
今日は先日見たヤンマーYT4014A+コバシ・アースロータリーFTV262の枕地を除く真ん中だけの自動運転の様子の続きです。、真ん中だけ自動運転のロボットトラクターならではの耕耘パターン、田起こし回り方図解です。
あらかじめどう回るかトラクターの頭の中にパターンが入っていますし、衛星で自分の位置を把握していますから、隣の耕耘痕のガイドも必要なく、「枕地を極力荒らさない」という意識で走っているように見えました。
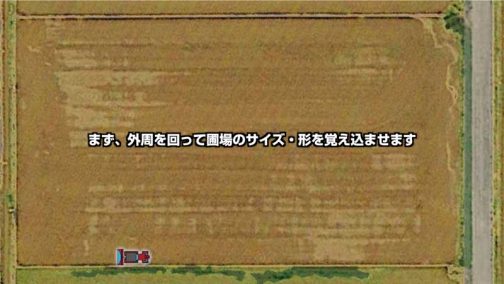
まずは田起こし回り方図解動画
ざっと動画を見ていただいて一々解説します。


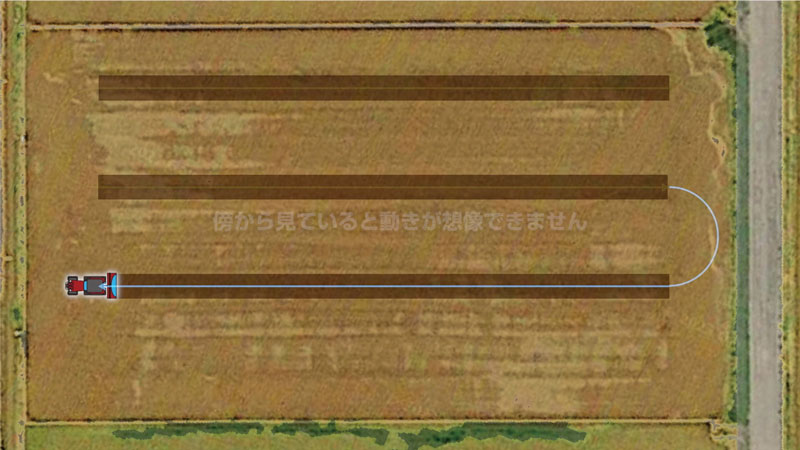


あ!確か耕耘の重なりの設定は5センチほどだったと記憶しています。



最終的にはこのように回っています


以前マニュアルでやっているのを見ましたが、重なりがちぐはぐになったりと辻褄はさすがに合いませんでした。
最後に色々な図解を貼っておしまいにします
それではまた明日!
1
/
5
代かき図解SHORT版(ハロー幅3.8m、44m×72mの田んぼ)
1956~1975メーカー別運輸省農機型式認定数
マサカの田舎
コマツ・インターナショナルカタログで衝撃の発見!
田おこしの一筆書きパターン収集リメイク版#1
なぜこうなった??トラクターの転倒
リメイク版田おこしの一筆書き
ロボット田植機NW10SA回り方収集(短縮版)
ロボット田植機NW10SA回り方収集(実写混合版)
代かきパターン図解2020(ハロー幅3 8m、44m×72mの田んぼ)
田おこしの一筆書きトラクタ操作アニメーション版!「シロウト向け田おこし講座」
8条植え、田植えルート取りの観察例
最後で辻褄。ロボットトラクターならではの耕耘パターン
代かきパターン図解その2(ハロー4.1m、44m×84mの田んぼ)
代かきパターン図解(ハロー幅4.1m、20m×40mの田んぼ)
1
/
5